
Chris Fawcett, Mauro Vallati, Frank Hutter, Jörg Hoffmann, Holger H. Hoos, Kevin Leyton-Brown
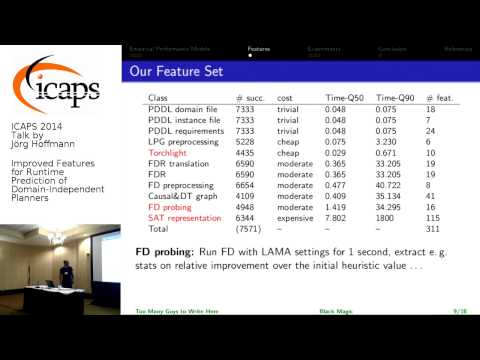
Improved Features for Runtime Prediction of Domain-Independent Planners
short paper
Recordings
Vidal Alcázar, Susana Fernandez, Daniel Borrajo
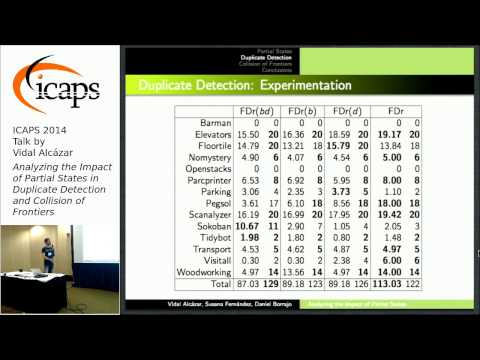
Analyzing the Impact of Partial States on Duplicate Detection and Collision of Frontiers
short paper
Peng Yu, Cheng Fang, Brian Williams
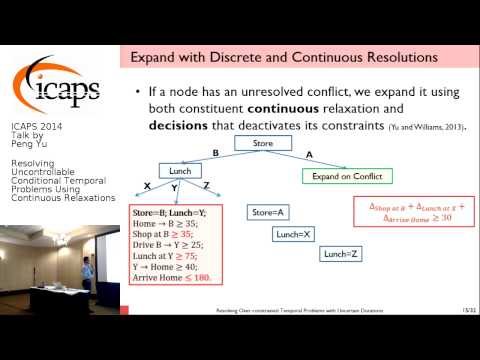
Resolving Uncontrollable Conditional Temporal Problems using Continuous Relaxations

Christopher Wilt, Adi Botea
Spatially Distributed Multiagent Path Planning

Yevgeniy Vorobeychik, Bo An, Milind Tambe, Satinder Singh
Computing Solutions in Infinite-Horizon Discounted Adversarial Patrolling Game

Xing Tan, Michael Gruninger
The Complexity of Partial-Order Plan Viability Problems
Michal Štolba, Antonín Komenda
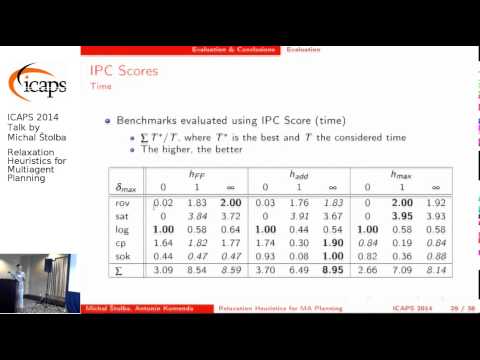
Relaxation Heuristics for Multiagent Planning

Guy Shani, Erez Karpas, Ronen Brafman, Shlomi Maliah
Partially Observable Online Contingent Planning Using Landmark Heuristics
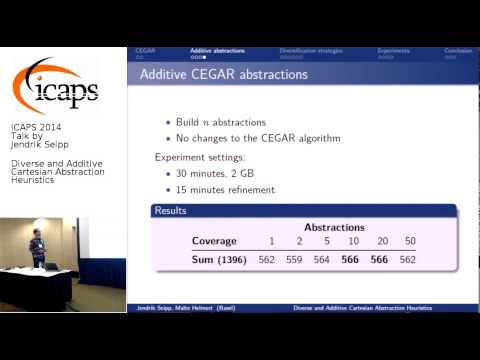
Jendrik Seipp, Malte Helmert
Diverse and Additive Cartesian Abstraction Heuristics
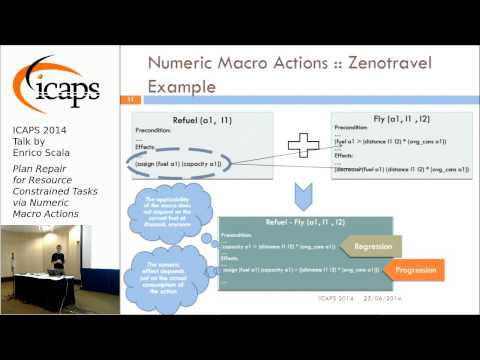
Enrico Scala
Plan Repair for resource constrained tasks via numeric macro actions
Pedro Santana, Brian Williams
Chance-Constrained Consistency for Probabilistic Temporal Plan Network

Diederik Roijers, Joris Scharpff, Matthijs Spaan, Frans Oliehoek, Mathijs De Weerdt, Shimon Whiteson
Bounded Approximations for Linear Multi-Objective Planning under Uncertainty

Mark Roberts, Adele Howe, Indrajit Ray
Evaluating Diversity for Classical Planning
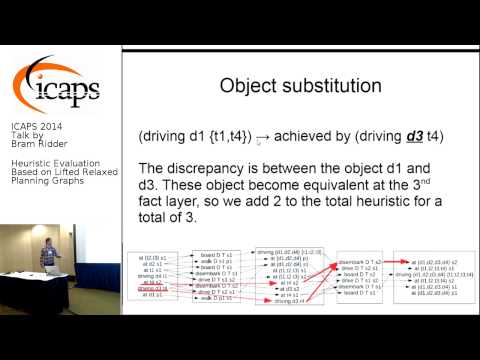
Bram Ridder, Maria Fox, Derek Long
Heuristic Evaluation based on Lifted Relaxed Planning Graphs

Miquel Ramírez, Sebastian Sardina
Directed Fixed-Point Regression-based Planning for Non-Deterministic Domain

Florian Pommerening, Gabriele Röger, Malte Helmert, Blai Bonet
LP-based Heuristics for Cost-optimal Planning

Luis Pineda, Shlomo Zilberstein
Planning under Uncertainty Using Reduced Models: Revisiting Determinization

Mike Phillips, Sven Koenig, Maxim Likhachev
Parallel A* for Planning with Time-consuming State Expansions
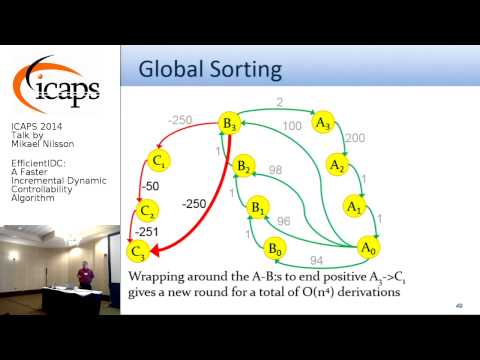
Mikael Nilsson, Jonas Kvarnström, Patrick Doherty
EfficientIDC: A Faster Incremental Dynamic Controllability Algorithm

Tuan Nguyen, Subbarao Kambhampati
An Heuristic Approach to Planning with Incomplete STRIPS Action Models