

T. K. Satish Kumar, Sangmook Jung, Sven Koenig
A Tree-Based Algorithm for Construction Robots
Recordings

Steven Levine, Brian Williams
Concurrent Plan Recognition and Execution for Human-Robot Teams

Caroline Ponzoni Carvalho Chanel, Charles Lesire, Florent Teichteil-Königsbuch
A Robotic Execution Framework for Online Probabilistic (Re)Plannin

Marcello Cirillo, Federico Pecora, Henrik Andreasson, Tansel Uras, , Sven Koenig
Integrated Motion Planning and Coordination for Industrial Vehicles

Martin Suda
Property Directed Reachability for Automated Planning

Cedric Pralet, Gerard Verfaillie
Time-dependent Simple Temporal Networks: Properties and Algorithms

Michael W. Otte, Nikolaus Correll
C-FOREST: Parallel Shortest-Path Planning with Super Linear Speedu
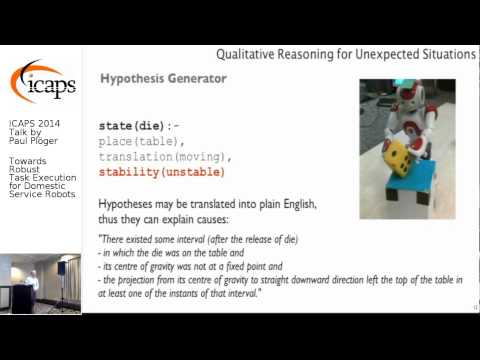
A. Kuestenmacher, N. Akhtar, P. Plöger, G. Lakemeyer
Towards Robust Task Execution for Domestic Service Robots
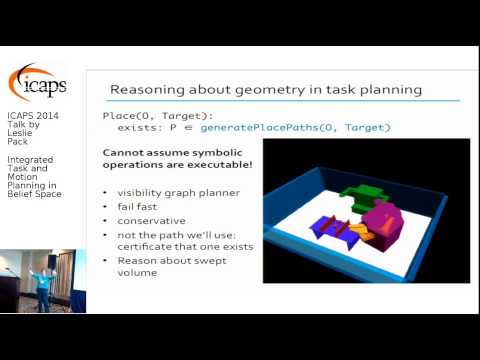
Leslie Pack Kaelbling, Tomas Lozano-Perez
Integrated Task and Motion Planning in Belief Space

Todd Hester, Peter Stone
TEXPLORE: Real-Time Sample-Efficient Reinforcement Learning for Robot
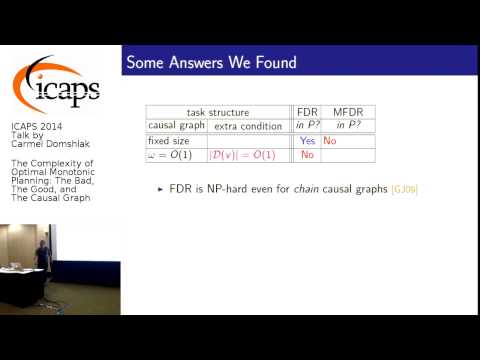
Carmel Domshlak, Anton Nazarenko
The Complexity of Optimal Monotonic Planning: The Bad, The Good, and The Causal Graph

Giuseppe De Giacomo, Fabio Patrizi, , Sebastian Sardina
Building Virtual Behaviors from Partially Controllable Available Behaviors in Nondeterministic Environments
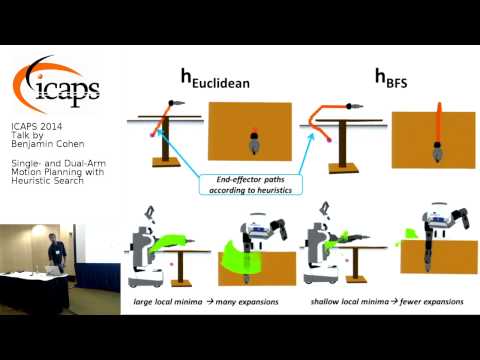
Benjamin Cohen, Sachin Chitta, , Maxim Likhachev
Single and Dual-Arm Motion Planning with Heuristic Search

J. Capitan, M. Spaan, L. Merino, , A. Ollero
Decentralized Multi-Robot Cooperation with Auctioned POMDPs

Zohar Feldman, Carmel Domshlak
On MABs and Separation of Concerns in Monte-Carlo Planning for MDPs

Sam Wiseman, Stuart Shieber
Discriminatively Reranking Abductive Proofs for Plan Recognition
short paper
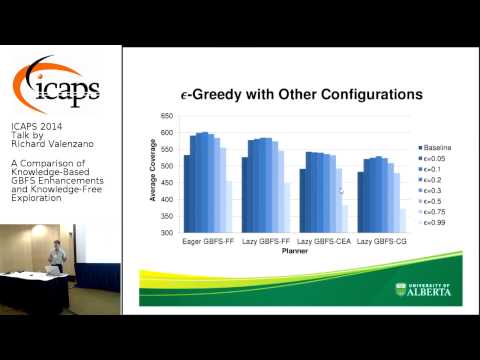
Richard Valenzano, Nathan Sturtevant, Jonathan Schaeffer, Fan Xie
A Comparison of Knowledge-Based GBFS Enhancements and Knowledge-Free Exploration
short paper

Christian Muise, Sheila Mcilraith, Vaishak Belle
Non-Deterministic Planning With Conditional Effects
short paper
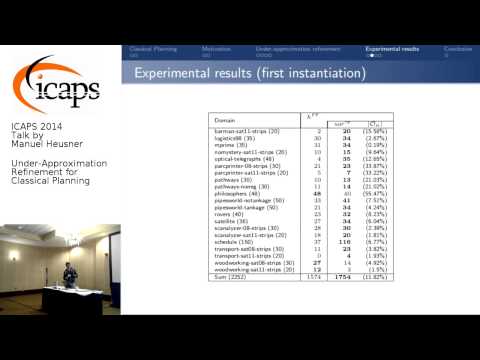
Manuel Heusner, Martin Wehrle, Florian Pommerening, Malte Helmert
Under-Approximation Refinement for Classical Planning
short paper

Richard Freedman, Hee-Tae Jung, Shlomo Zilberstein
Plan and Activity Recognition from a Topic Modeling Perspective
short paper