

Alexander Javier Benavides, Marcus Ritt
Iterated Local Search Heuristics for Minimizing Total Completion Time in Permutation and Non-permutation Flow Shops
Recordings

Doron Nussbaum, Alper Yörükçü
Moving Target Search with Subgoal Graphs

Vidal Alcázar, Álvaro Torralba
A Reminder about the Importance of Computing and Exploiting Invariants in Planning

Raúl Mencía, María R. Sierra, Carlos Mencía, Ramiro Varela
Schedule Generation Schemes and Genetic Algorithm for the Scheduling Problem with Skilled Operators and Arbitrary Precedence Relations

Zongzhang Zhang, David Hsu, Wee Sun Lee, Zhan Wei Lim, Aijun Bai
PLEASE: Palm Leaf Search for POMDPs with Large Observation Spaces

Daniel Gnad, Joerg Hoffmann
Beating LM-Cut with h^max (Sometimes): Fork-Decoupled State Space Search

Fan Xie, Martin Müller, Robert Holte
Understanding and Improving Local Exploration for GBFS

Masataro Asai, Alex Fukunaga
Solving Large-Scale Planning Problems by Decomposition and Macro Generation
Joerg Hoffmann, Maximilian Fickert
Explicit Conjunctions without Compilation: Computing hFF(PiC) in Polynomial Time
Alejandro Torreño, Óscar Sapena, Eva Onaindia
Global Heuristics for Distributed Cooperative Multi-Agent Planning

The ICAPS Three
Planning, planning, planning
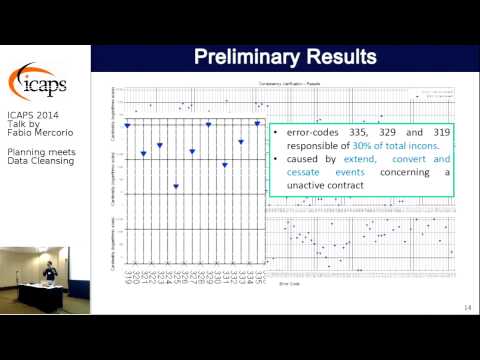
Roberto Boselli, Mirko Cesarini, Fabio Mercorio, Mario Mezzanzanica
Planning meets Data Cleansing
short paper

Cédric Pralet, Gérard Verfaillie, Adrien Maillard, Emmanuel Hébrard, Nicolas Jozefowiez, Marie-Josée Huguet, Thierry Desmousceaux, Pierre Blanc-Paques, Jean Jaubert
Satellite Data Download Management with Uncertainty about the Generated Volume

Simon Parkinson, Peter Gregory, Andrew Longstaff, Andrew Crampton
Automated Planning for Multi-Objective Machine Tool Calibration: Optimising Makespan and Measurement Uncertaint
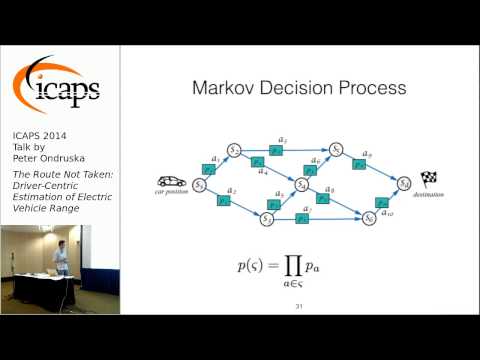
Peter Ondruska, Ingmar Posner
The Route Not Taken: Driver-Centric Estimation of Electric Vehicle Rang

Nir Lipovetzky, Christina Burt, Adrian Pearce, Peter Stuckey
Planning for Mining Operations with Time and Resource Constraint

Akshat Kumar, Sudhanshu Singh, Pranav Gupta, Gyana Parija
Near-Optimal Nonmyopic Contact Center Planning Using Dual Decomposition

Carlos Hernández Ulloa, Jorge Baier, Roberto Asín
Making A* Run Faster than D*-Lite in Path-Planning in Partially Known Terrain
short paper
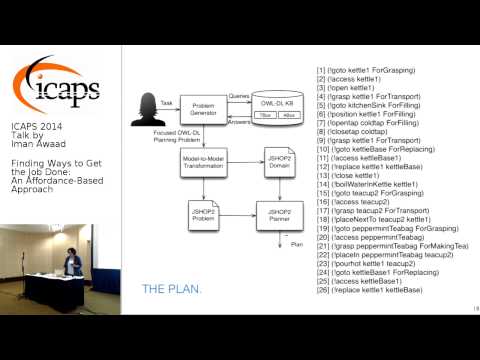
Iman Awaad, Gerhard K. Kraetzschmar, Joachim Hertzberg
Finding Ways to Get the Job Done: An Affordance-based Approach
short paper
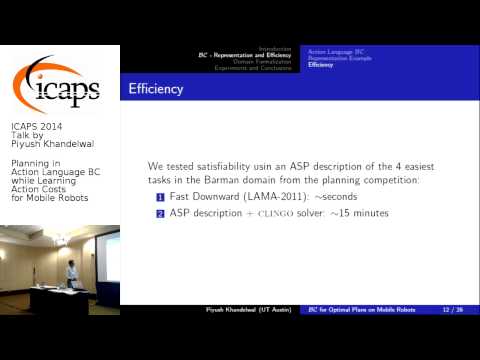
Fangkai Yang, Piyush Khandelwal, Matteo Leonetti, Vladimir Lifschitz, Peter Stone
Planning in Action Language BC while Learning Action Costs for Mobile Robots